# Obstacle Avoidance Robot
# Introduction
An Obstacle Avoidance Robot is an autonomous robot that can sense and overcome obstacles on its path. It uses Ultrasonic sensors to detect the obstacles on its path. Almost all navigation robots require some form of obstacle detection, hence Obstacle Avoidance Robot is applicable in wide range of fields. Let's build and program the Obstacle Avoidance Robot with KiMu's Automate Kit.
# Key skills/Learnings
- Assembly of Components
- Problem Solving
- Logical Thinking
- Mechanics & Motion
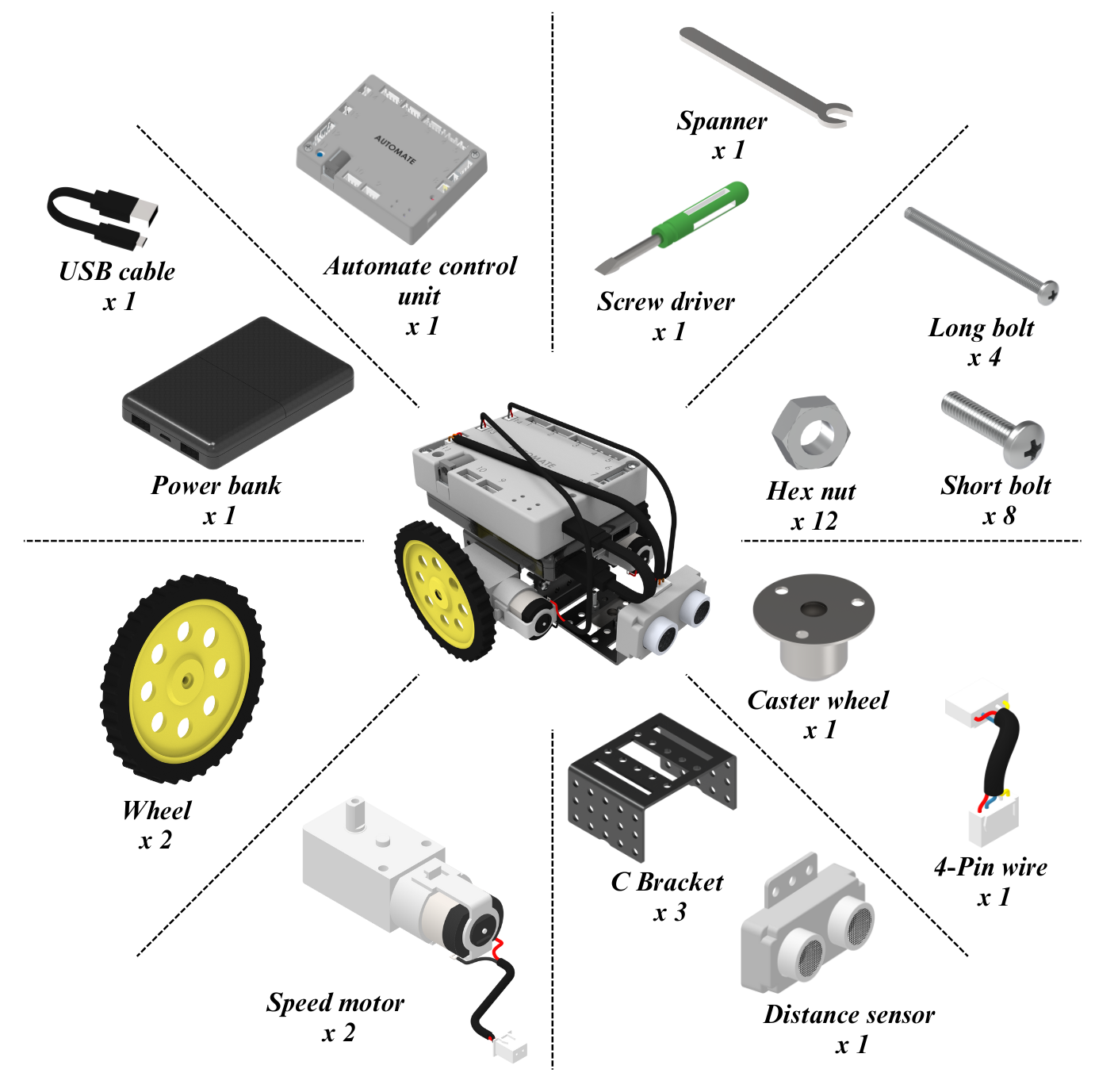
# List of Items
# Assemble the Robot
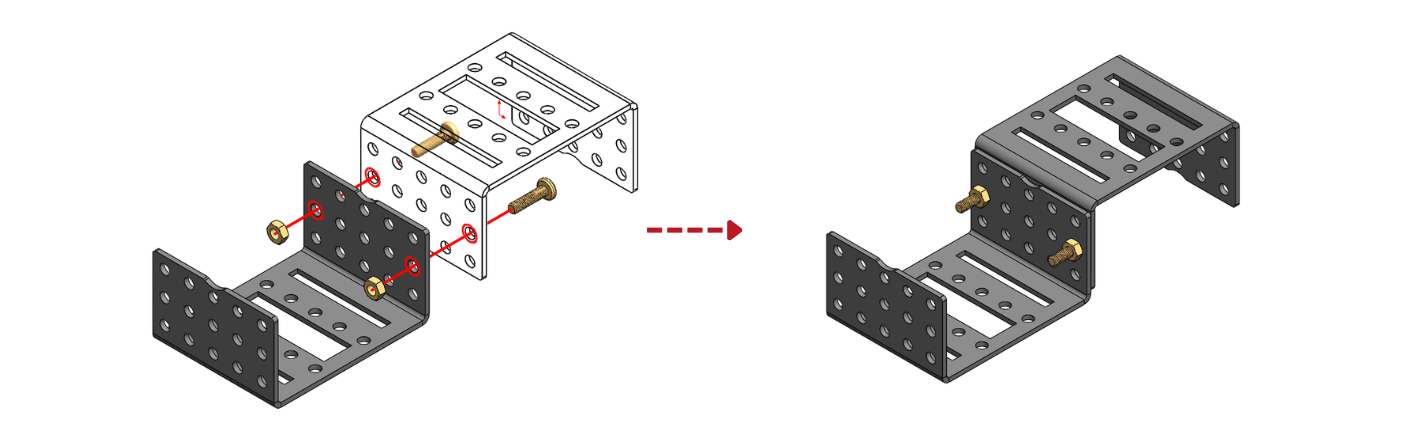
Step 1: Assemble two C-Brackets using short bolts and nuts.
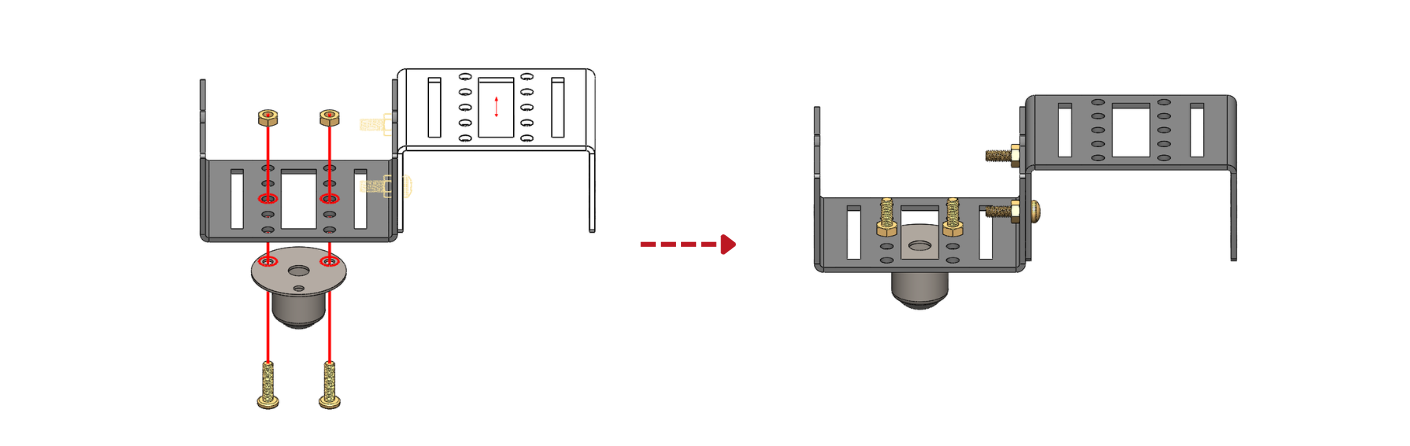
Step 2: Connect the Caster wheel to the C-bracket assembly from step 1 usingshort bolts and nuts.
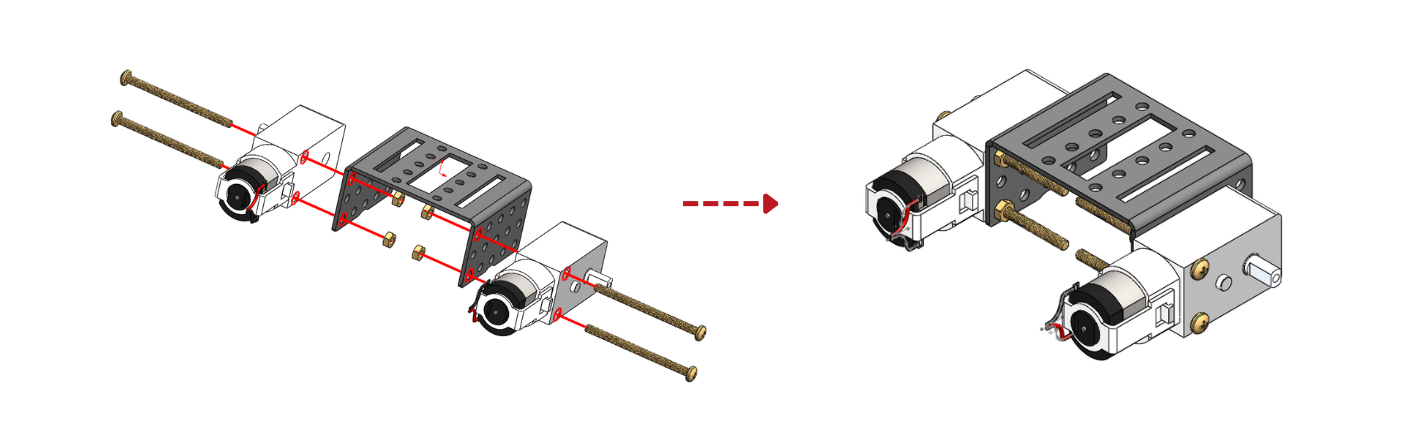
Step 3: Assemble speed motors to new C bracket using long bolts and nuts.
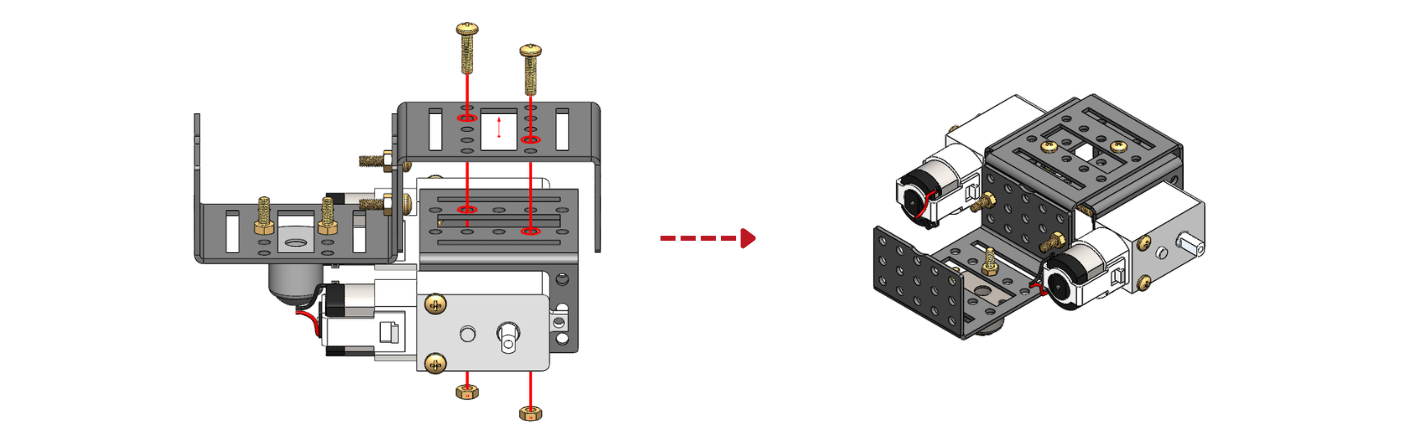
Step 4: Connect the C-bracket assemblies from step 2 and 3 using short boltsand nuts.
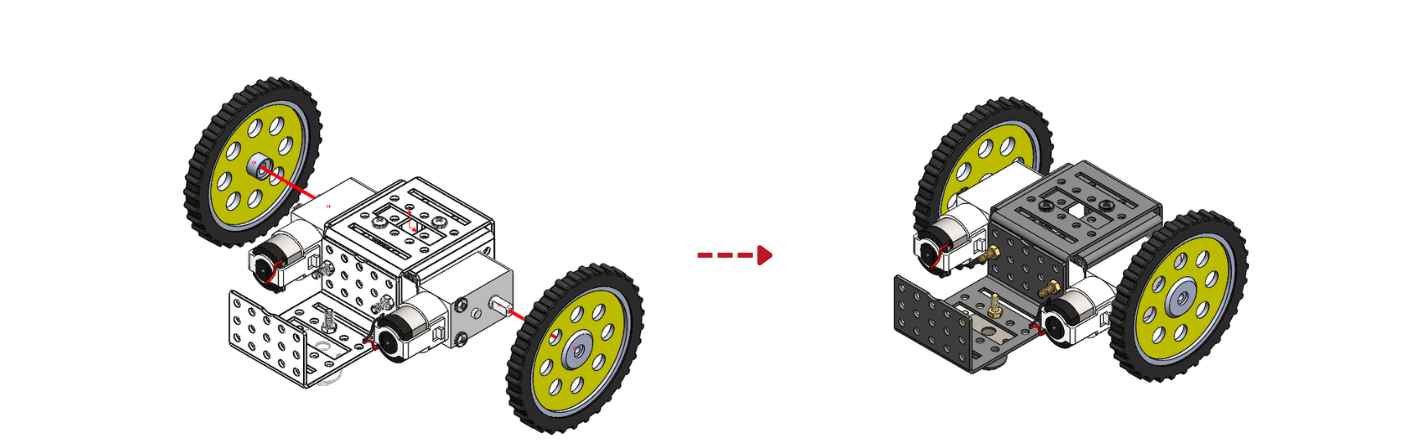
Step 5: Connect the two wheels to the two-speed motors.
 Step 6: Connect the distance sensor to the assembly form step 5 using short bolts and nuts.
Step 6: Connect the distance sensor to the assembly form step 5 using short bolts and nuts.
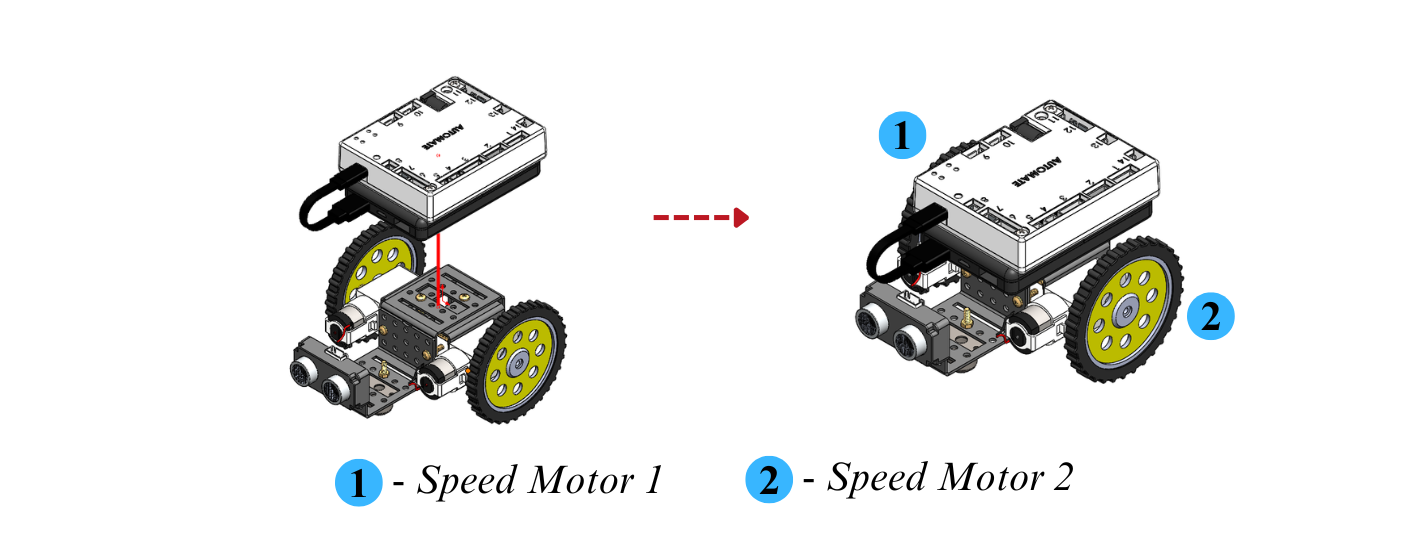
 Step 7: Use Double side tape to stick the controller, power bank and the above assembly together.
Step 7: Use Double side tape to stick the controller, power bank and the above assembly together.
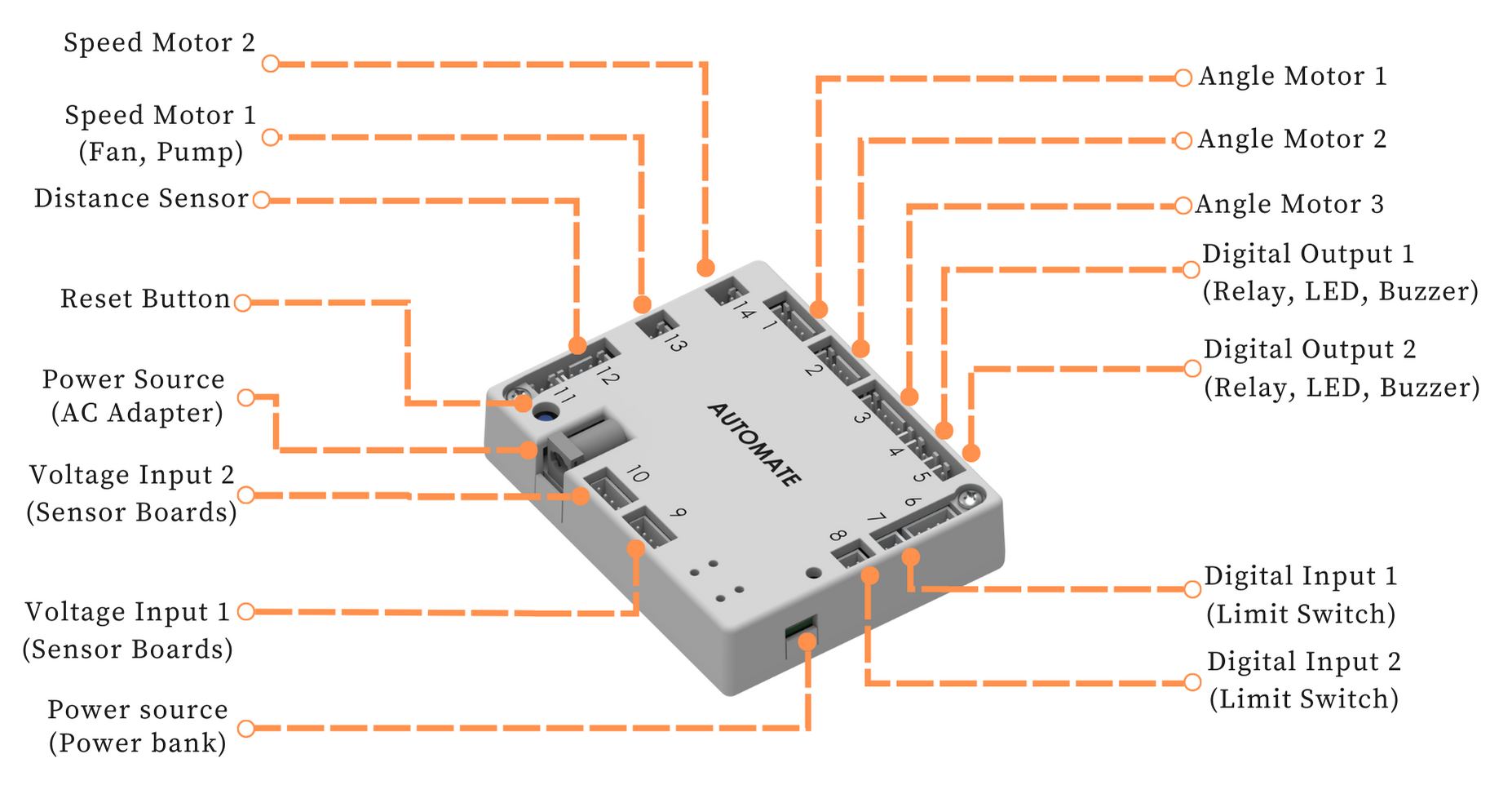
 Step 8: For the connections of Speed motors, Distance sensor and power refer to below image.
Step 8: For the connections of Speed motors, Distance sensor and power refer to below image.
# Programming with Automate App
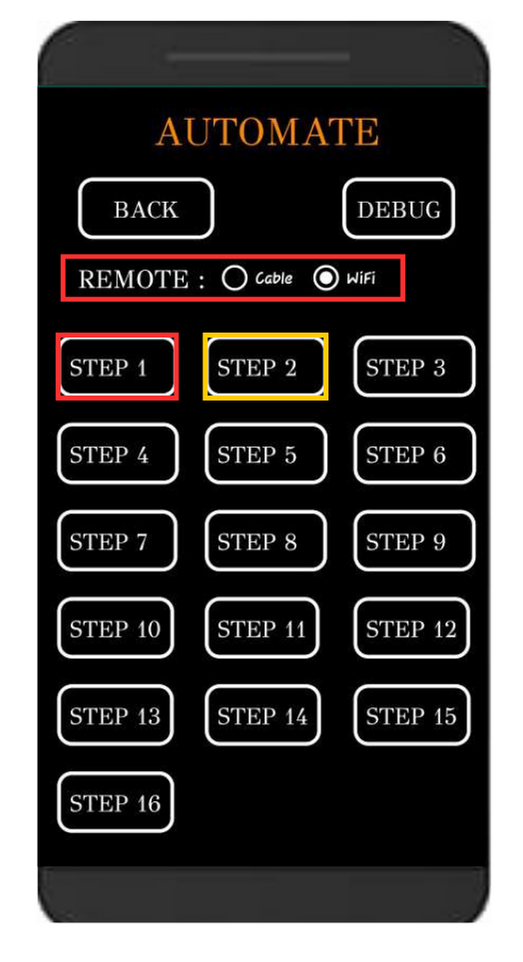
# Configuring the app - Remote controls setup
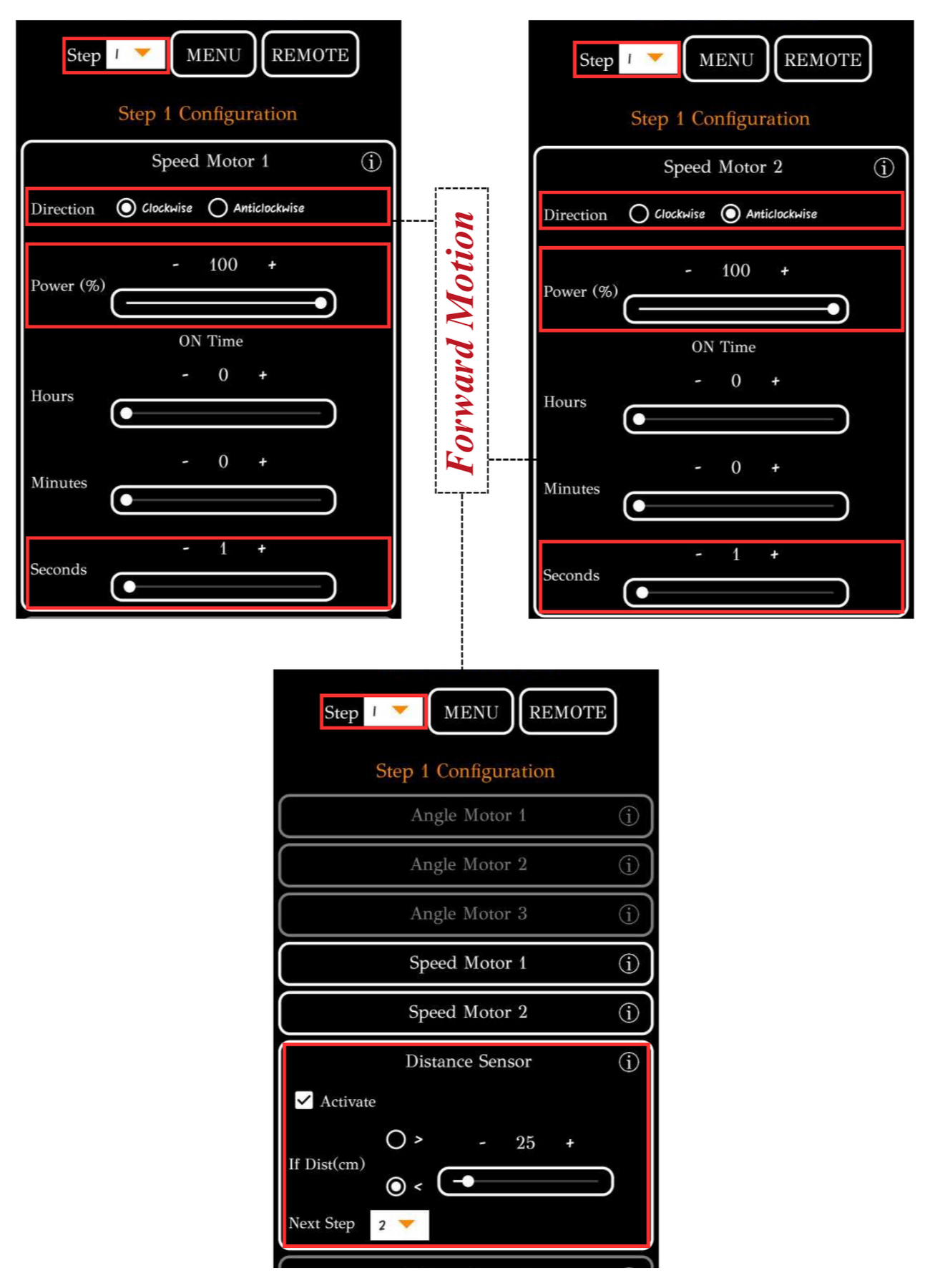
STEP 1 - Start - Move forward
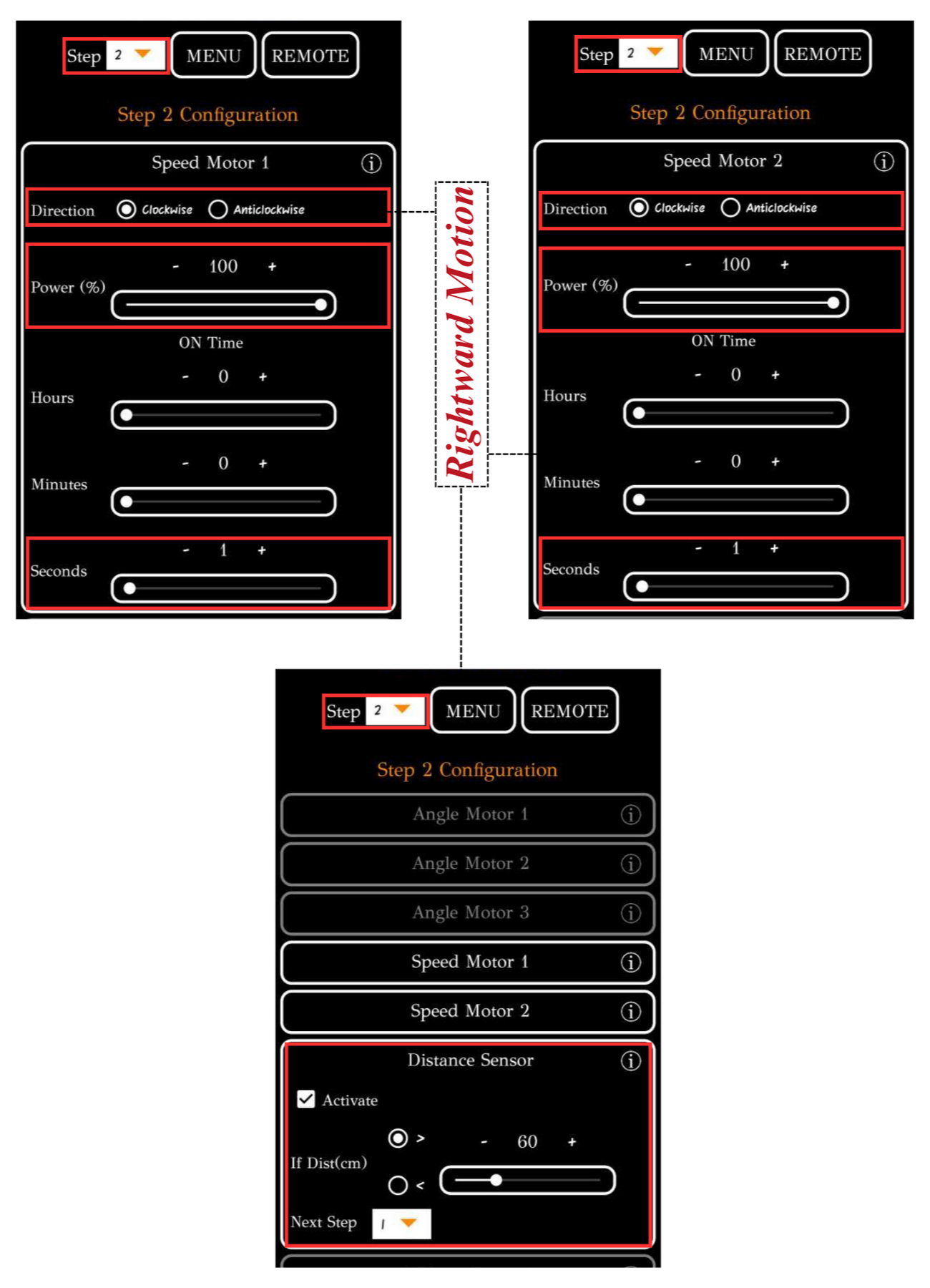
[STEP 2 - Turn right]
TO "STOP" THE OAR CLICK ON ANY BUTTON OTHER THAN THE ABOVE CONFIGURED BUTTONS.
Note: Automate can be controlled using a cable by selecting the cable option instead of Wi-Fi under the remote option.
To upload the program, see How to upload the program to the Control Unit with Automate App?
Obstacle avoiding robot is ready to dodge obstacles after uploading this program
# More Information
For more details, see FAQs on Automate Kit.